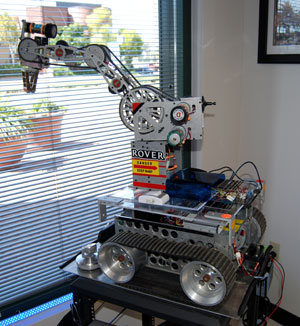
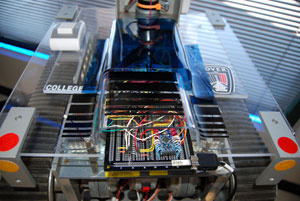
SCIT's student project room has recently added another addition to its gallery of creative projects. Dubbed the "Rover", this robot can move on many different surfaces with its tank-like continuous tracks. Equipped with a gripper the "Rover" can pick up and move objects with its elaborate gearing system. The control system incorporates the unique properties of the Ninteno Wii "Nun Chuck" controller. The data from the accelerometer inside the controller is transmitted to a microcontroller and sent to motors that control the various motions. The Wii controller's accelerometer is based on a 3-dimensional x-y-z coordinate system that can sense motion in every direction. This allows for complete control over these motions by simple movements of the hand and a thumb joystick. As explained by one of the students who worked on the project, Scott Solwick, "The tank is controlled by a microcontroller called the Arduino chip, which uses two voltage sources 12 volts and 5 volts. The 5 volts source is used to trigger the 12 volts to move the motors. The Arduino software "Sketch" controls the outputs on the chip. The software communicates with the chip through the c programming language. The Arduino has both analog and digital outputs. The analog outputs are used with a Pulse Width Modulation as a speed controller for the wheels and the digital outputs are utilized for the robots arm movements."